

Аэродинамика самолета боинг-737 (300 – 900)
Аэродинамика самолета Боинг-737 (300 – 900)
Боинг 737 — самый популярный в мире узкофюзеляжный реактивный пассажирский самолёт. Он является самым массово производимым реактивным пассажирским самолётом за всю историю пассажирского авиастроения. Несмотря на это, фирма Боинг не опубликовала общедоступного документа, отражающего аэродинамические особенности своего детища. В статье предпринимается попытка осветить данный вопрос по аналогии, как это делалось на всех советских самолетах. Основной текст касается «классической» модификации (300-500), с дополнительной информацией по модификации NG (600-900).
Содержание
Особенности аэродинамической компоновки самолета Боинг-737
Система управления самолетом
Силовая установка
Скорость полета
Расчёт центровки самолёта
Взлет самолета
Посадка самолета
Устойчивость и управляемость
Система автоматического управления
Полет самолета при несимметричной тяге
Отказобезопасность
Недостатки самолета
Особенности аэродинамической компоновки самолета Боинг-737
Геометрические характеристики крыла
“Classic”
Площадь крыла 1135 ft2 или 105.44м2.
Размах крыла 94’9’’ или 28.88 м (102’5’’ или 31.22 м с winglets)
Относительное удлинение крыла 9.16
Сужение крыла 0.24
Угол стреловидности 25 градусов
Средняя аэродинамическая хорда (САХ) 134,5 inches или 341,63 см
“NG” (Размах крыла 35.75 м с winglets)
Максимальное аэродинамическое качество самолета – 15.
Вертикальные законцовки крыла (winglets).

Законцовки представляют собой дополнительные профилированные поверхности, предназначенные для уменьшения концевого вихря крыла, благодаря чему уменьшается индуктивное сопротивление.
См. http://aviacom.ucoz.ru/Principleflight.doc стр.45
Законцовки могут устанавливаться по желанию заказчика и благодаря их установке улучшаются следующие качества самолета:
1. Взлетные характеристики. Особенно в аэропортах, где максимальный взлетный вес самолёта ограничен препятствиями и/или ограничениями по шумам, аэропортах с высокой температурой, большим превышением. Поскольку увеличение аэродинамического качества обеспечивает более крутой набор высоты после отрыва.
2. Продлевается жизнь двигателей и уменьшаются расходы на их обслуживание. Лучшие характеристики набора высоты позволяют уменьшать требуемый режим двигателей на взлете. Также улучшение аэродинамического качества уменьшает потребный режим двигателей в крейсерском полете (до 4%).
3. Экономия топлива. В крейсерском полете километровый расход топлива уменьшается на 6%. Соответственно на ту же дальность можно перевезти больше груза.
4. Самолет быстрее набирает крейсерский эшелон, где воздушное пространство менее загружено и есть возможность летать по спрямленным маршрутам.
Кроме очевидных достоинств законцовки имеют ряд недостатков:
1. Дополнительный вес 170-235 кг.
2. Усиливается чрезмерная поперечная устойчивость самолёта (см. раздел Устойчивость и управляемость), что приводит к дополнительным ограничениям бокового ветра на посадке.
3. За счет смещения центра масс крыла назад уменьшается критическая скорость флаттера крыла. (см. http://aviacom.ucoz.ru/Principleflight4.doc стр.17)
Это одна из возможных причин, приведших к необходимости ограничения угла выпуска интерцепторов-элеронов на V>320 узлов (Load Alleviation System).
4. Версия программного обеспечения FMC часто не учитывает изменения лётных характеристик после установки законцовок. Особенно эти несоответствия заметны в расчёте характеристик снижения.
Поперечное управление
Поперечное управление осуществляется элеронами (ailerons) и интерцепторами-элеронами (flight spoilers). На «классике» 4 секции интерцепторов-элеронов (см. рисунок в разделе Механизация крыла).
На NG восемь секций интерцепторов-элеронов (см. рисунок ниже).
При наличии гидропитания на рулевых приводах элеронов поперечное управление работает следующим образом:
-перемещение штурвальных колес штурвалов (полное отклонение – ±107,5 градусов) по тросовой проводке передается на рулевые приводы элеронов и далее на элероны;
-кроме элеронов, рулевые приводы элеронов перемещают пружинную тягу (aileron spring cartridge), связанную с системой управления интерцепторами и таким образом приводят её в движение;
-движение пружинной тяги передается на устройство изменения передаточного коэффициента (spoiler ratio changer). Здесь управляющее воздействие уменьшается в зависимости от величины отклонения рукоятки управления интерцепторами (speed brake lever). Чем больше отклонены интерцепторы в режиме воздушных тормозов, тем меньше коэффициент передачи перемещения штурвалов по крену;
-далее перемещение передается на механизм управления интерцепторами (spoiler mixer), где оно суммируется с перемещением рукоятки управления интерцепторами. На крыле с поднятым элероном интерцепторы приподнимаются, а на другом крыле – приспускаются. Таким образом, одновременно выполняются функции воздушного тормоза и поперечного управления. Интерцепторы включаются в работу при повороте штурвального колеса более 10 градусов;
-также, вместе со всей системой, движется тросовая проводка от устройства изменения передаточного коэффициента до устройства зацепления (lost motion device) механизма связи штурвалов.
Устройство зацепления соединяет правый штурвал с тросовой проводкой управления интерцепторами при рассогласовании более 12 градусов (поворота штурвального колеса).
На штурвальном колесе нанесены деления (units), позволяющие контролировать величину отклонения. Каждый unit соответствует 6° отклонения штурвального колеса.
Конструкция рулевых приводов элеронов такова, что при отсутствии гидропитания они позволяют пилотам двигать тросовую проводку элеронов напрямую, используя корпус рулевого привода, как жесткую тягу. При этом в системе управления образуется зона нечувствительности (люфт) 3° по углу поворота колеса штурвала. При повороте колеса штурвала на угол более 12° придёт в движение тросовая проводка системы управления интерцепторами. Если при этом рулевые машины интерцепторов будут работать, то интерцепторы будут работать в помощь элеронам.
Эта же схема позволяет второму пилоту управлять самолётом по крену с помощью интерцепторов при заклинении штурвала командира или тросовой проводки элеронов. При этом ему необходимо приложить усилие порядка 80-120 фунтов (36-54 кг), чтобы преодолеть усилие предварительной затяжки пружины в механизме связи штурвалов (aileron transfer mechanism), отклонить штурвал более 12 градусов и тогда вступят в работу интерцепторы.
При заклинении правого штурвала или тросовой проводки интерцепторов командир имеет возможность управлять элеронами, преодолевая усилие пружины в механизме связи штурвалов.
В случае заклинения одного из элеронов на соответствующей качалке срезается срезная заклёпка. Оставшийся элерон продолжает отклоняться нормально.
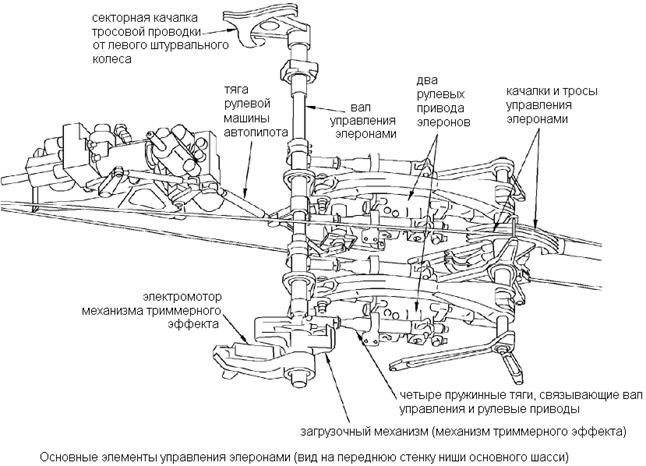
Рулевой привод элеронов соединен тросовой проводкой с левой штурвальной колонкой через загрузочный механизм (aileron feel and centering unit). Данное устройство имитирует аэродинамическую нагрузку на элеронах, при работающем рулевом приводе, а также смещает положение нулевых усилий (механизм триммерного эффекта). Пользоваться механизмом триммерного эффекта элеронов можно только при отключенном автопилоте, поскольку автопилот управляет рулевым приводом напрямую, и будет пересиливать любые перемещения загрузочного механизма. Зато в момент отключения автопилота эти усилия сразу же передадутся на проводку управления, что приведет к неожидаемому кренению самолета. Для управления механизмом триммерного эффекта установлено два переключателя. Один из них определяет сторону смещения нейтрали, а второй включает питание электродвигателя. Триммирование произойдет только при нажатии на оба переключателя одновременно.
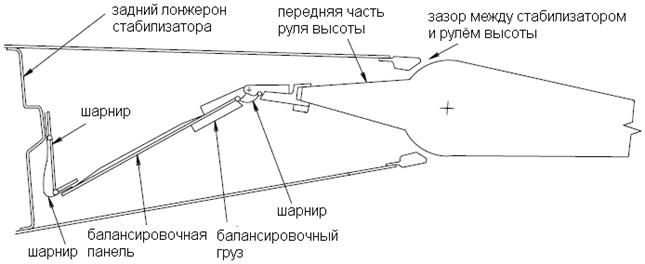
Для уменьшения усилий при ручном управлении (manual reversion) элероны имеют кинематические сервокомпенсаторы (tabs) и балансировочные панели (balance panel).
(см. http://aviacom.ucoz.ru/Principleflight3.doc стр.5)
Сервокомпенсаторы кинематически связаны с элеронами и отклоняются в противоположную отклонению элерона сторону. Это уменьшает шарнирный момент элерона и усилия на штурвале.
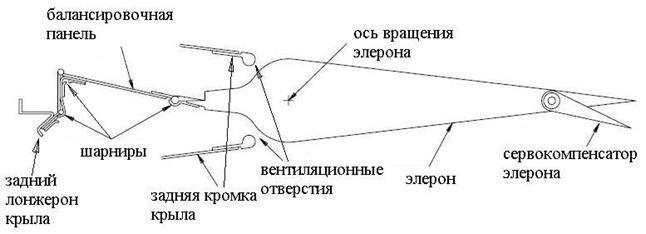
Балансировочные панели представляют собой панели соединяющие переднюю кромку элерона с задним лонжероном крыла с помощью шарнирных соединений. При отклонении элерона, например, вниз — на нижней поверхности крыла в зоне элерона возникает зона повышенного давления, а на верхней – разрежения. Этот перепад давления распространяется в зону между передней кромкой элерона и крылом и, воздействуя на балансировочную панель, уменьшает шарнирный момент элерона.
При отсутствии гидропитания механизм триммерного эффекта реального уменьшения усилий не обеспечивает. Триммировать усилия на рулевой колонке можно с помощью руля направления или, в крайнем случае, разнотягом двигателей.
Углы отклонения элеронов: вверх — 20°, вниз — 15°. Разница в углах отклонения вверх и вниз позволяет уменьшить вредный момент рыскания от элеронов
(см. http://aviacom.ucoz.ru/Principleflight3.doc стр.12).
На земле, при нейтральном колесе штурвала оба элерона отклонены вниз на 1°, задняя кромка элерона ниже поверхности крыла на 9 мм (зависание элеронов). В полёте, под действием зоны разряжения над крылом, проводка элеронов деформируется и элероны «всплывают» и становятся вровень с крылом, что уменьшает лобовое сопротивление.
Продольное управление
Управляющими поверхностями продольного управления являются: руль высоты, обеспеченный гидравлическим рулевым приводом, и стабилизатор, обеспеченный электрическим приводом. На задней кромке руля высоты установлен сервокомпесатор, предназначенный для облегчения отклонения руля пилотами при отказе гидропитания. Также руль высоты в концевой части имеет выступ («рог»), в котором размещается балансировочный груз. В весовом отношении руль высоты полностью сбалансирован.
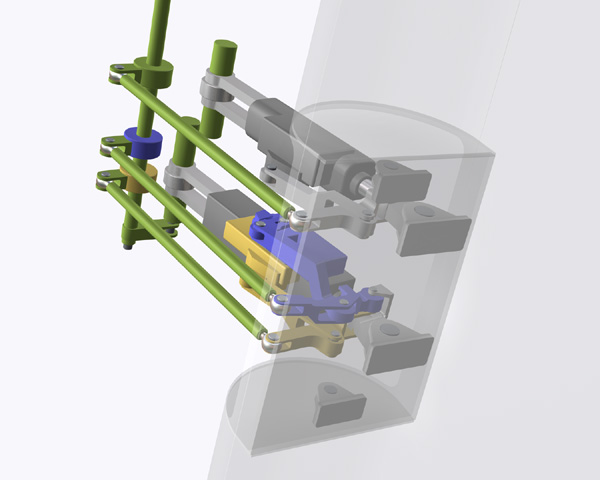
На «классике» штурвальные колонки командира и второго пилота соединены между собой жестко. На “NG” при заклинении одной из штурвальных колонок вторая сохранит свою подвижность.
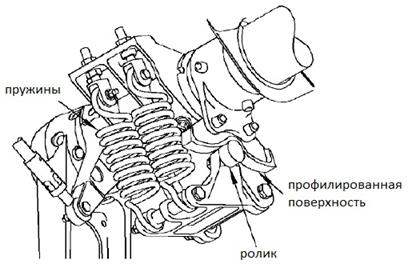
На рисунке изображён узел, позволяющий раздельное движение штурвалов по тангажу. На командирской стороне расположена профилированная поверхность, к которой пружинами прижимается ролик, связанный со штурвалом второго пилота. Для преодоления сопротивления пружин пилоту, на чьей стороне не заклинило проводку управления, понадобится приложить дополнительное усилие 31 фунт (14 кг). Для дальнейшего отклонения штурвала придётся преодолевать сопротивление заклинившей половины тросовой проводки. Это резко ограничит диапазон возможного отклонения штурвала и увеличит потребные усилия. Так отклонения руля высоты на 4° потребуется усилие 100 фунтов (45 кг). Хотя эти усилия больше, чем при пилотировании самолёта без гидроусилителей (manual reversion), но управляемость, достаточная для выполнения посадки, сохраняется. Усилия снимать отклонением стабилизатора.
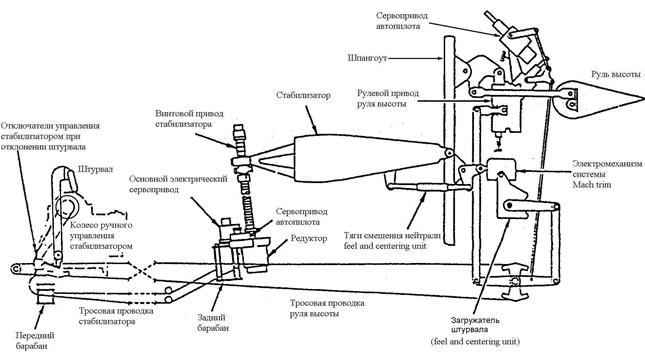
Штурвалы пилотов связаны с гидравлическими приводами руля высоты с помощью тросовой проводки. Кроме пилотов на проводку управления рулём высоты воздействуют: рулевая машина автопилота (когда включена), раздвижная тяга электромеханизма Mach Trim System и при изменении положения стабилизатора происходит смещение нейтрали загружателя штурвала (feel and centering unit).
Нормальное управление стабилизатором осуществляется от переключателей на штурвалах или автопилотом. Резервное управление стабилизатором — механическое с помощью колеса управления на центральном пульте управления.
Управление рулем высоты
Две половины руля высоты механически соединены между собой с помощью трубы. Гидроприводы руля высоты питаются от гидросистем А и В. Подачей гидрожидкости к приводам управляют переключатели в кабине пилотов (Flight Control Switches).
Одной работающей гидросистемы достаточно для нормальной работы руля высоты.
В случае отказа обоих гидросистем (manual reversion) руль высоты отклоняется вручную от любого из штурвалов. Для уменьшения шарнирного момента руль высоты оснащен двумя аэродинамическими сервокомпенсаторами и шестью балансировочными панелями.
Наличие балансировочных панелей приводит к необходимости установки стабилизатора полностью на пикирование (0 units) перед обливом противообледенительной жидкостью. Такая установка предотвращает попадание слякоти и противообледенительной жидкости в воздушные полости балансировочных панелей, поскольку стабилизатор будет иметь положительный угол наклона 4° (передняя кромка выше задней).
На модификации “NG” аэродинамические сервокомпенсаторы при выпущенных закрылках и наличии давления в гидросистемах перестраиваются на антикомпенсаторы.
Принцип работы сервокомпенсатора и антикомпенсатора см. http://aviacom.ucoz.ru/Principleflight3.doc стр 5, 6
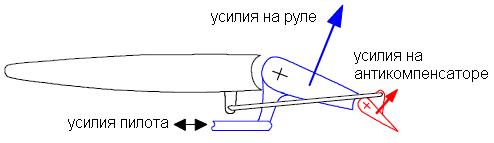


На левой половине руля высоты перестройка осуществляется по команде от FCC. Гидроцилиндр работает от гидросистемы А.
На правой половине – по сигналу датчика положения закрылков с задержкой на 10 секунд.
Гидроцилиндр работает от гидросистемы В.
На фото видно, что при руле высоты, отклонённом на пикирование, сервокомпенсатор на левой половине отклонён вверх (работает как сервокомпенсатор), а на правой половине – отклонён вниз (работает как антикомпенсатор). Это произошло потому, что была включена в работу только гидросистема В.
В AFM (Aircraft Flight Manual) 737-800 написано, что зафиксированы случаи вибрации сервокомпенсатора на приборной скорости более 275 узлов в диапазоне высот от 10000 до 25000 футов, при этом перед полётом производилась процедура удаления льда/противообледенения стабилизатора.
В связи с тем, что сервокомпенсатор может вызвать вибрацию проводки управления (См. Недостатки самолёта №6), то логично было бы выпустить закрылки, поскольку антикомпенсатор не способствует отклонению руля и, соответственно, не должен вызывать вибрацию. Хотя QRH в данном случае рекомендует только плавно уменьшить скорость до прекращения вибрации, не использовать интерцепторы в полёте и произвести посадку на ближайшем аэродроме.
Поскольку руль высоты не имеет аэродинамического триммера и в проводке управления нет механизма триммерного эффекта, то снять усилия с отклонённого штурвала невозможно. Чтобы усилия на штурвале исчезли, его нужно вернуть в нейтральное положение. При этом требуемого изменения в балансировке достигают путём перекладки стабилизатора. На всех установившихся режимах полёта независимо от высоты, скорости и тангажа штурвал всё время находится в приблизительно одном и том же нейтральном положении, которое может немного изменяться в зависимости от положения стабилизатора и работы системы MACH TRIM.
Нейтральное положение руля высоты относительно самолёта меняется в зависимости от положения стабилизатора. Руль высоты как бы «стремится» находиться в одной плоскости со стабилизатором. При работающем рулевом приводе руля высоты это обеспечивается за счёт смещения нейтрали загружателя штурвала, при включенном автопилоте – за счёт отслеживания положения стабилизатора датчиком автопилота и выдаче соответствующей команды на рулевой привод. При перекладке стабилизатора из положения 0 units в положение 17 units, штурвал смещается на 4,3 см на кабрирование, что соответствует перекладке руля высоты около 7°.
При положении стабилизатора 3 units, руль высоты опущен вниз на 4°.
При перекладке стабилизатора на кабрирование до 10 units, руль высоты займёт горизонтальное положение.
При угле стабилизатора 14 units, руль высоты поднимется вверх на 2,75°.
На самолетах модификации “NG” положение нейтрали руля высоты регулируется не только механически смещением нейтрали загружателя, но и электрическим сигналом от компьютера контролирующего управление самолётом FCC (flight control computer). Данный компьютер воздействует на проводку управления рулём высоты через электромеханизм системы MACH TRIM.
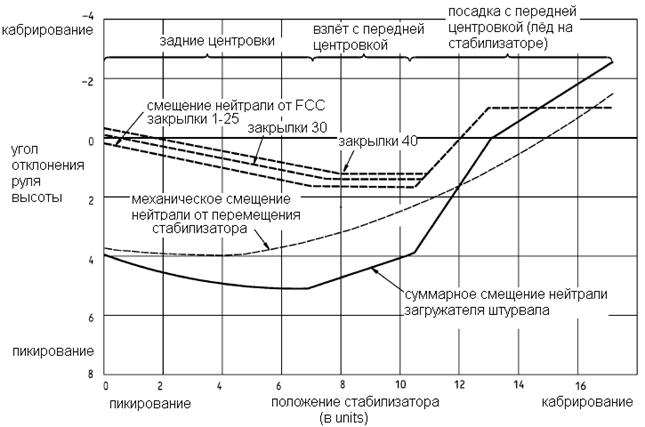
Функция смещения нейтрали от FCC работает только при отключенном автопилоте и выпущенных закрылках, когда пилот перекладывает стабилизатор нажатием переключателя на штурвале или меняет положение закрылков.
Положение стабилизатора то 7 до 10,5 units соответствует взлёту с передней центровкой. FCC при этом командует на смещение нейтрали руля высоты ~ 1,5° на пикирование. Стабилизатор в балансировочном положении (при нулевых усилиях на штурвале) при этом будет больше отклонён на кабрирование, что улучшает управляемость на взлёте (увеличивает запас руля высоты на кабрирование).
Поскольку гидравлические приводы руля высоты включены в проводку управления по необратимой схеме, то аэродинамическая нагрузка от рулей на штурвалы не передаётся. Усилия искусственно создаются с помощью загружателя штурвала (feel and centering unit) на который, воздействуют:
— механизм смещения нейтрали (точки нулевых усилий), механически связанный со стабилизатором;
— механизм системы Mach trim system;
— гидравлический имитатор аэродинамической нагрузки (elevator feel computer).
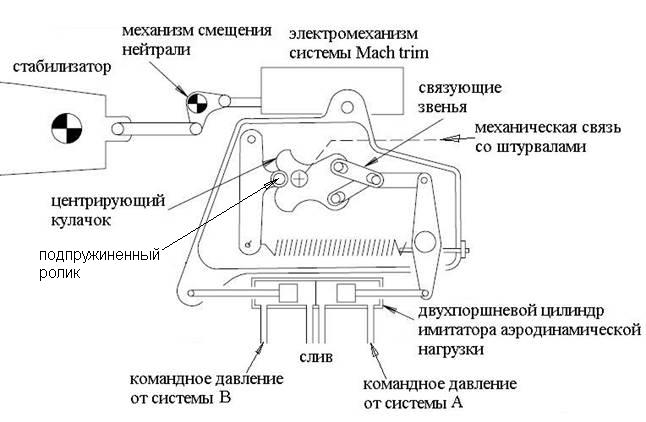
При отклонении штурвала поворачивается центрирующий кулачок, при этом подпружиненный ролик выходит из своей «ямки» на боковую поверхность кулачка. Стремясь под действием пружины вернуться обратно, он создает усилие в поводке управления, препятствующее отклонению штурвала. Кроме пружины на ролик воздействует исполнительный механизм имитатора аэродинамической нагрузки (elevator feel computer). Чем больше командное давление, тем сильнее ролик будет прижиматься к кулачку, что будет имитировать возрастание скоростного напора. Особенностью двухпоршневого цилиндра является то, что он воздействует на загружатель штурвала максимальным из двух командных давлений. Это легко понять по рисунку, поскольку между поршнями давления нет, и цилиндр будет находиться в нарисованном состоянии только при одинаковых командных давлениях. Если же одно из давлений станет больше, то цилиндр сместится в сторону большего давления, пока один из поршней не упрется в механическую преграду, исключив, таким образом, цилиндр с меньшим давлением из работы.
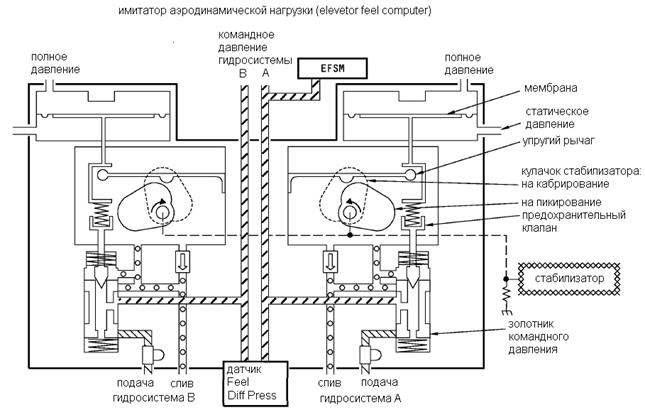
На вход elevator feel computer поступает скорость полета (от приемников воздушного давления, установленных на киле) и положение стабилизатора.
Под действием разности полного и статического давлений мембрана (q diaphragm) прогибается вниз, смещая золотник командного давления. Чем больше скорость, тем больше командное давление.
Изменение положения стабилизатора передается на кулачок стабилизатора, который через упругий рычаг ограничивает опускание мембраны и, соответственно, рост командного давления. Чем больше стабилизатор отклонен на кабрирование, тем меньше максимальное командное давление.
Предохранительный клапан предназначен для защиты от чрезмерного увеличения командного давления.
Таким образом гидравлическое давление из гидросистем А и В 3000 psi (210 атм.) преобразуется в соответствующее командное давление 200 – 2100 psi (от 14 до 150 атм.), воздействующее на загружатель штурвала. На NG диапазон командных давлений 180 -1400 psi.
Если, при убранных закрылках, разница в командных давлениях становится более 25%, то пилотам выдается сигнал FEEL DIFF PRESS. Эта ситуация возможна при отказе одной из гидросистем или одной из веток приемников воздушного давления. Никаких действий от экипажа не требуется, поскольку система продолжает нормально функционировать.
На самолётах модификации NG к каналу командного давления от гидросистемы А подключен модуль создания дополнительного давления EFSM (elevator feel shift module). Он выдаёт давление 850 psi когда включается в работу система предупреждения о приближении сваливания самолёта.
Управление стабилизатором
Стабилизатор управляется электродвигателями триммирования: один из них управляется вручную от переключателей на штурвалах, второй — от автопилота. На NG электродвигатель один, а управляется он от штурвала или автопилотом по независимым каналам.
Также обеспечена механическая связь со стабилизатором с помощью колеса управления и тросовой проводки. На случай заклинивания любого из электродвигателей предусмотрена муфта, разъединяющая проводку управления стабилизатором от электродвигателей. Чтобы сработала муфта, надо приложить усилие к колесу управления и сделать примерно пол-оборота.
Полный ход стабилизатора 0 — 17 units (-0.2 – 16.9 на NG). Он возможен только от механической системы управления.
Диапазон работы автопилота ограничен 0,25 – 14 units (0.05 – 14.5 на NG).
Управление от переключателей на штурвале еще более ограничено: 0,25 – 12,5 (0.05 – 14.5 на NG) при выпущенных закрылках и 2,5 – 12,5 (3.95 – 14.5 на NG) при убранных.
Диапазон 2 – 6,9 units (Green band) соответствует эксплуатационному диапазону центровок, соответственно 30% — 5% САХ. На NG этот диапазон 2,65 – 8,5 units, соответственно для центровок 36% — 6% САХ. При положении стабилизатора вне данного диапазона при переводе РУД на взлетный режим будет звучать прерывистый звуковой сигнал (Takeoff configuration warning).
Управление электродвигателем ручного триммирования выполняется от нажимных переключателей на штурвалах пилотов. Один из переключателей отвечает за направление триммирования, а второй включает питание электродвигателя.
Нажатие этих переключателей при подключенном автопилоте приводит к его отключению.
При отклонении штурвальной колонки от нейтрали срабатывают выключатели, прерывающие цепь управления стабилизатором в сторону противоположную отклонению. Например, при взятии штурвала на себя невозможно отклонить стабилизатор на пикирование. Чтобы отключить данное ограничение на центральном пульте есть выключатель «OVERRIDE». Его нужно использовать при заклинении проводки рулём высоты, чтобы управлять самолётом по тангажу с помощью только одного стабилизатора.
Скорость перекладки стабилизатора зависит от положения закрылков — при их выпуске увеличивается в три раза.
Автопилот управляет стабилизатором с помощью сервопривода автопилота. Скорость перекладки также зависит от положения закрылков. При выпущенных закрылках она равна скорости ручной перекладки с убранными закрылками, а при убранных – в два раза меньше.
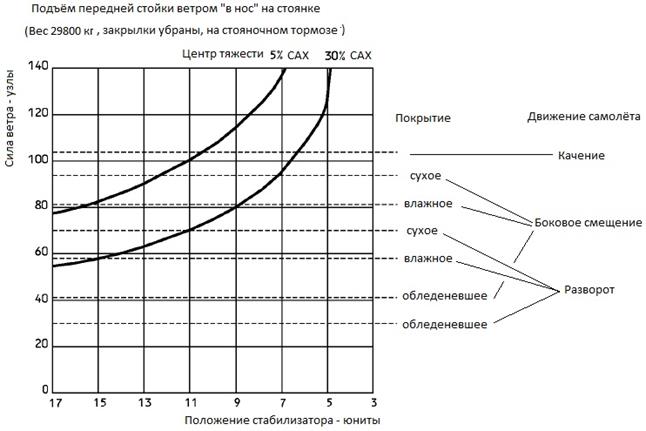
При постановке самолёта на стоянку на длительный период следует стабилизатор отработать полностью на пикирование. В зимний период это связано с предотвращением затекания противообледенительной жидкости и растаявшего снега/слякоти в полости балансировочных панелей руля высоты. В остальной период это имеет смысл для предотвращения подъёма передней стойки самолёта на стоянке от порыва встречного ветра (особенно пустого, незаправленого самолёта).
Ниже приведён график зависимости силы ветра, способного опрокинуть самолёт на хвост в зависимости от положения стабилизатора, а также пунктирными линиями показана сила ветра, приводящая к смещению самолёта.
Путевое управление
Путевое управление самолетом обеспечивается рулем направления. Перемещения педалей управления по тросовой проводке передаются на вертикально расположенную трубу (torque tube) в киле самолета. Вращение этой трубы через тяги связи передается на главный рулевой привод (main PCU) и резервный рулевой привод (standby PCU). К этой же трубе снизу прикреплен загружатель педалей (feel and centering unit), который имитирует аэродинамическую нагрузку на педалях и обеспечивает фиксированное положение руля направления при работе рулевого привода.
На руле отсутствует сервокомпенсатор, то есть отклонять руль направления в полете мускульным усилием практически невозможно.
Главный рулевой привод работает от гидросистем А и В. Резервный привод питается от резервной (standby) гидросистемы. Работа любой из трех гидросистем полностью обеспечивает путевое управление.
В главный рулевой привод встроен исполнительный механизм демпфера рысканья. (см. Боковая устойчивость и управляемость.) Он запитан от гидросистемы В.
Триммирование руля направления с помощью ручки на центральном пульте осуществляется смещением нейтрали механизма триммерного эффекта. Там же находится шкала с указателем отклонения руля направления в units.
На самолетах серии 300-500 производилась модификация схемы управления рулем направления (RSEP modification). RSEP –Rudder System Enhancement Program. Внешний признак выполнения данной модификации – дополнительное табло «STBY RUD ON» в левом верхнем углу панели FLIGHT CONTROL.
Модификация должна быть выполнена на всех самолетах до ноября 2008 года. Причиной явились две катастрофы и инцидент, в которых предположительной причиной назван отказ рулевого привода руля направления.
Первая катастрофа произошла 3 марта 1991 года с Боингом 737-200 в районе города Colorado Springs в США. (Источник информации: NATIONAL TRANSPORTATION SAFETY BOARD
WASHINGTON, D.C. 20594 AIRCRAFT ACCIDENT REPORT)
За 6 дней до катастрофы на этом самолете в полете возникло правое скольжение, которое экипаж устранил, выключив демпфер рыскания. Техсостав провел работы по демпферу, но скольжение повторилось через два дня снова. Опять демпфер был выключен и на земле были выполнены работы. В дальнейших полетах, вплоть до катастрофы, замечаний не было.
3 марта в 9.37 утра второй пилот доложила, что полосу наблюдает, и получила разрешение на визуальный заход на полосу 35. Ветер был 320 градусов 16 порывы 29 узлов. Также диспетчер доложил, что предшествующий борт докладывал о сдвиге ветра на глиссаде.
В 9.41 диспетчер дал команду после посадки не пересекать полосу 30, которая занята взлетающими бортами. Второй пилот подтвердила прием информации. Это была последняя передача экипажа.
В процессе разворота на посадочный с креном 20 градусов второй пилот доложила «1000 футов». В последующие 4 секунды темп разворота резко усилился. Она сказала «О, бог», тяга двигателей стала возрастать, поступила команда командира «Закрылки 15», что говорило о попытке уйти на второй круг.
Тем не менее, вращение продолжалось, скорость выросла до 200 узлов и перегрузка до 4. При столкновении самолет пикировал с углом тангажа 80 градусов.
Вторая катастрофа произошла 8 сентября 1994 года с Боингом 737-300 в районе города Aliquippa в США.
Инцидент произошел 9 июня 1996 года в районе города Richmond в США.
Предположительной причиной этих происшествий был самопроизвольный уход руля направления в крайнее положение. Это приводило к неконтролируемому кренению самолёта.
Главный рулевой привод руля направления до модификации RSEP имел двойной золотник (внутренний и внешний). Если они были слишком плотно подогнаны и имели значительное трение между собой, а пилот, по каким – либо причинам, допускал резкое движение педалями, то золотник мог уйти в крайнее положение и, соответственно, открыть путь гидрожидкости к полному неконтролируемому отклонению руля.
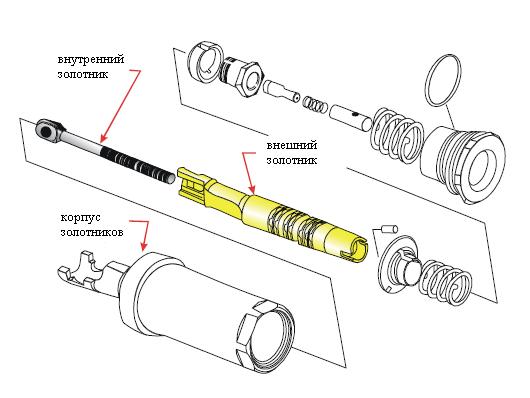
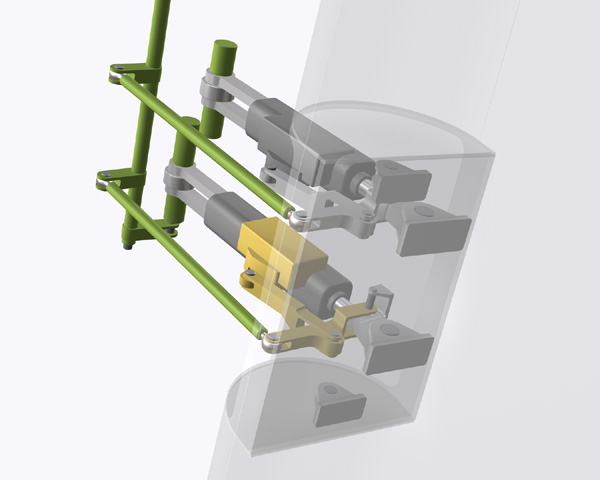
После модификации RSEP в главном рулевом приводе руля направления стало два независимых золотника, работающих от системы А и В. Соответственно к каждому из них подходит независимый рычаг управления. См. рисунки: вверху до модификации, внизу – после.
Поскольку сейчас на одном рулевом приводе появилось два независимых входа при фактически одном выходе, то появилась возможность возникновения усилий внутри рулевого привода. За этой ситуацией следит датчик внутренних усилий FFM (force fight monitor), который сразу же включает арбитра – резервную гидросистему с резервным рулевым приводом руля направления. Резервный рулевой привод помогает исправному каналу перебороть отказавший. В кабине пилотов при этом загораются сигналы: “Master Caution” с “FLT CONT” и на верхнем пульте — лампа “STBY RUD ON”. Согласно QRH от пилотов в этом случае требуется избегать больших или резких движений педалями.
Поскольку полное отклонение руля высоты может потребоваться только на этапах взлёта, посадки и ухода на второй круг для парирования разворачивающего момента при отказе двигателя, а на остальных этапах полёта это не нужно и даже опасно, то в системе управления рулём направления предусмотрено ограничение давления подаваемой гидрожидкости.
На «классике» это ограничение включается при наборе высоты более 1000 футов и отключается при снижении ниже 700 футов. На «NG» это происходит, соответственно, при разгоне скорости более 135 узлов и при торможении менее 135 узлов. У пилотов нет ни какой индикации работы системы ограничения давления, за исключением – на «классике», если в гидросистеме А прошла команда на увеличение давления, а оно не увеличилось, то загорается лампа “LOW PRESSURE” на пульте FLT CONTROL «A».
Механизация крыла
Механизация крыла состоит из механизации передней кромки (leading edge devices), закрылков и интерцепторов.
Механизация передней кромки состоит из 4-х секционных отклоняемых предкрылков Крюгера (flaps) и 6-ти секционных выдвижных щелевых предкрылков (slats). По две секции предкрылков Крюгера расположены между фюзеляжем и мотогондолой и по 3 секции выдвижных предкрылков на оставшейся части передней кромки крыла. Предкрылки Крюгера (Krueger flaps) отклоняются поворотом части передней кромки вперед-вниз и не имеют промежуточных положений в процессе выпуска. Выдвижные предкрылки выпускаются перемещением части передней кромки вперед с образованием щели и имеют два фиксированных выпущенных положения (EXTEND) и (FULL EXTEND).
Менее эффективные предкрылки Крюгера установлены в корневой части крыла для организации первоначального срыва потока в районе центроплана (при выпущенной механизации).
Закрылки 4-х секционные щелевые. Имеют фиксированные углы выпуска 1, 2, 5 ,10, 15, 25 , 30 и 40 градусов. На «классике» закрылки трёхщелевые (см. рисунок внизу).
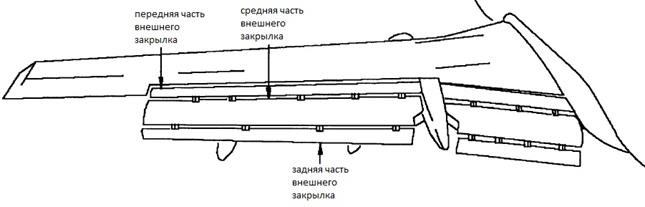
На «NG» закрылки двухщелевые, причём задняя щель не распространяется на весь размах закрылков (см. рисунок внизу).
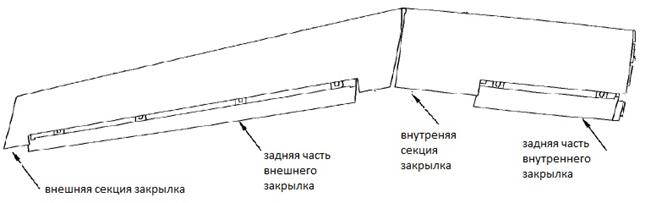
Расположение рулевых поверхностей и механизации крыла на «классическом» самолёте.

Предкрылки и закрылки при выпуске значительно увеличивают подъемную силу крыла за счет увеличения длины хорды и кривизны профиля, таким образом, уменьшая скорость захода на посадку и увеличивая маневренные возможности самолета. Выпуск закрылков до 15 увеличивает подъемную силу при относительно малом увеличении сопротивления, при дальнейшем выпуске закрылков сопротивление возрастает значительно быстрее роста подъемной силы.
Система автоматического довыпуска выдвижных предкрылков (auto slat system) улучшает характеристики самолета на больших углах атаки на взлете и заходе на посадку. При отклоненных закрылках на угол 1 – 5 градусов выдвижные предкрылки находятся в промежуточном (EXTEND) положении. Когда угол атаки крыла приближается к сваливанию, выдвижные предкрылки автоматически довыпускаются полностью (FULL EXTEND) прежде, чем сработает предупреждающая тряска штурвала. После уменьшения угла атаки предкрылки возвращаются в исходное положение.
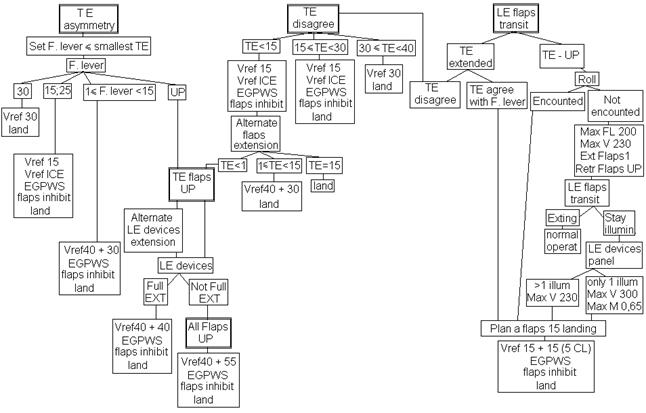
Алгоритм решения проблем с механизацией крыла:
Силовая установка
Боинг 737 (300-500) оснащен двигателем CFM 56, который имеет 4 модификации:
CFM 56 — 3 — В4;
CFM 56 — 3 — В1;
CFM 56 — 3В – 2;
CFM 56 — 3С — 1 развивающие максимальную тягу соответственно 18,5; 20; 22 и 23,5 тысяч фунтов (1 фунт равен 0.4536 кг) тяги. Причём программа регулирования двигателя такова, что заданная тяга двигателя выдерживается постоянной в широком диапазоне температур воздуха (скоростей полёта), пока не наступает срезка тяги, с целью не превышения допустимой температуры газов.
На Боинге 737-800 устанавливаются двигатели CFM56-7B в трёх возможных конфигурациях:
— В24 с взлётной тягой 24200 фунтов;
— В26 с взлётной тягой 26400 фунтов;
— В27 с взлётной тягой 27300 фунтов.
Автомат тяги
Автомат тяги — это управляемая компьютером электромеханическая система, которая управляет тягой двигателей. Автомат перемещает РУДы так, чтобы поддерживать заданные обороты N1 или заданную скорость полета в течение всего полета от взлета до касания ВПП. Он рассчитан для работы совместно с цифровой системой управления полетом (DFCS) и навигационным компьютером (FMC).
Принцип совместной работы с DFCS: скорость полёта выдерживается, либо изменением траекторного угла (DFCS) при фиксированном режиме работы двигателей (автомат тяги), либо изменением режима работы двигателей (автомат тяги) при фиксированном траекторном угле (DFCS).
Автомат тяги имеет следующие режимы работы:
N1 – выдерживание заданных оборотов вентилятора (величина заданного режима рассчитывается FMC или компьютером А/Т (ЕЕС на NG));
GA – выдерживание пониженного режима для ухода на второй круг;
FMC SPD – выдерживание скорости, рассчитанной FMC;
MCP SPD — выдерживание скорости, заданной на МСР;
RETARD – перевод РУДов на упор малого газа;
THR HLD – автомат тяги отключается от управления РУДами;
ARM – автомат тяги готов к включению в работу (на NG автомат тяги самостоятельно включится для защиты от потери скорости менее минимально-допустимой).
В связи с этим свойством, есть резон при заходе на посадку отключать автомат тяги не кнопками на РУДах, а нажатием кнопки-лампы SPEED на МСР. При этом автомат тяги переходит в режим ARM и, при необходимости ухода на второй круг, установит вам заданную тягу двигателям, а на NG также ещё защитит вас от непроизвольной потери скорости.
Режим THR HLD (Throttle Hold) включается при работе автомата тяги в режиме Взлёт (кнопка TO/GA нажата на земле) на скорости 80 узлов, индикация режима включается на скорости 84 узла. Пока режим включен изменить режим работы автомата тяги невозможно. РУДы отключены от сервоприводов и свободно перемещаются. Автоматическое прекращение режима происходит:
— на «классике» при высоте по радиовысотомеру более 400 футов и по истечении 17,5 секунд после отрыва от ВПП;
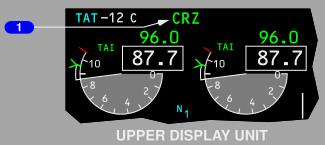
— на «NG» при высоте по радиовысотомеру более 800 футов и по истечении 10 секунд после отрыва от ВПП. Если после отрыва от ВПП на высоте менее 800 футов повторно нажать кнопку TO/GA, то на Thrust Mode Display (на рисунке обозначен цифрой 1) индикация сменится на GA и «bugs» переместятся на значение Full GA Thrust, но РУДы останутся неподвижными. Если высота при нажатии TO/GA будет более 800 футов, то РУДы переместятся в положение Full GA Thrust.
Компьютер автомата тяги р
Похожие записи:
 ᐅ Триммер бензиновый СОЮЗ БТС-9252Л отзывы — 18 честных отзыва покупателей о Триммеры Триммер бензиновый СОЮЗ БТС-9252Л
ᐅ Триммер бензиновый СОЮЗ БТС-9252Л отзывы — 18 честных отзыва покупателей о Триммеры Триммер бензиновый СОЮЗ БТС-9252Л  Купить Trymer golarki Braun 81314643: отзывы, фото и характеристики на
Купить Trymer golarki Braun 81314643: отзывы, фото и характеристики на  Триммер Champion Т374FS — цена, отзывы, характеристики, 1 видео, фото — купить в Москве и РФ
Триммер Champion Т374FS — цена, отзывы, характеристики, 1 видео, фото — купить в Москве и РФ  – купить триммер, сравнение цен интернет-магазинов: фото, характеристики, описание | E-Katalog") Oleo-Mac Sparta 38 (61219051E1) – купить триммер, сравнение цен интернет-магазинов: фото, характеристики, описание | E-Katalog
Oleo-Mac Sparta 38 (61219051E1) – купить триммер, сравнение цен интернет-магазинов: фото, характеристики, описание | E-Katalog